Создаем GPS-трекер для авто. Необходимый функционал:
- отправка GPS-данных по GSM/GPRS на интернет-сайт с сохранением в базе данных;
- просмотр маршрута авто за определенный интервал времени на web-странице с использованием Яндекс.Карт;
- просмотр в реальном времени текущего положения авто на web-странице с использованием Яндекс.Карт.
Используемые компоненты:
1) Плата Arduino UNO (поиск на AliExpress)

2) SIM900 GSM/GPRS шилд для Arduino (бесплатно предоставлен сервисом ЖелеZona). Стоит около 20$

3) GPS-модуль VK16E (цена около 9-10$ на AliExpress)

Начнем с описания модуля SIM900 GSM/GPRS.
Arduino GPRS/GSM Shield предоставляет вам возможность использовать сеть мобильной GSM связи для удаленного приема и передачи данных для Arduino-проектов. GPRS/GSM shield позволяет добиться этого с помощью одного из трех способов:
- SMS;
- Аудио (голос, CSD, DTMF);
- GPRS.
Рfссмотрим один из вариантов данного шилда – SIM900 Quad-Band GPRS shield (см. рис. 9.1) на основе чипа SIM900.
Основные характеристики GSM модуля SIM900:
- четыре диапазона GSM 850/ 900/ 1800/ 1900 МГц;
- класс передачи данных GPRS multi-slot class 10/8;
- соответствие стандарту GSM фазы 2/2+;
- класс мощности 4 (2 Вт в диапазонах 850/ 900 МГц) ;
- класс мощности 1 (1 Вт в диапазонах 1800/1900 MГц) ;
- управление AT командами (GSM 07.07 ,07.05 и фирменные AT команды SIMCom) ;
- аудиокодеки HR, FR, EFR, AMR, подавление эха;
- CSD до 14.4кбит/с;
- PPP-стек;
- встроенный стек TCP/IP, UDP/IP;
- протоколы HTTP и FTP;
- протокол защищенных сокетов SSL;
- декодирование DTMF-тонов;
- eMail - формирование и отправка электронных писем посредством АТ-команд;
- SMS Autorun - исполнение АТ-команд, полученных по SMS от определенного абонента;
- 2.5Mb user memory - встроенная память для пользовательских данных;
- MMS - формирование, дополнение пользовательскими файлами и отправка с помощью АТ-команд;
- AMR play - воспроизведение аудиофайлов в динамик или в сторону удаленного абонента;
- Jamming Detection - функция обнаружения глушения сигнала;
- FOTA - обновление прошивки модуля по беспроводному каналу;
- Easy Scan - получение информации об окружающих базовых станциях без подключения SIM-карты;
- PING - проверка доступности адреса в Internet посредством обмена ICMP пакетами;
Особенности данного шилда:
- совместимость с Arduino Mega;
- слот для карт SD ( включение/отключены при помощи перемычки);
- программное и аппаратное обеспечение последовательного порта: может общаться с Arduino через последовательный порт программного обеспечения (D7 / D8) или последовательный порт (D0 / D1);
- интерфейс FTDI;
- слот батарейки для RTC.
- 10 цифровых входов/выходов GPIO;
- 2 ШИМ выхода;
- I2C интерфейс
Данный шилд имеет два способа включения – аппаратный (кратковременное нажатие кнопки PWRKEY) и прграммный (используется выход D9 Arduino).
Получение GPS-данных
Модуль GPS V.KEL 16 один из самых дешевых и простых. Тем не менее имеет батарейку для сохранения данных о спутниках. По даташиту, холодный старт должен занимать 39 секунд, у меня это заняло примерно 20 минут. Следующий старт примерно 2 минуты. Назначение выводов
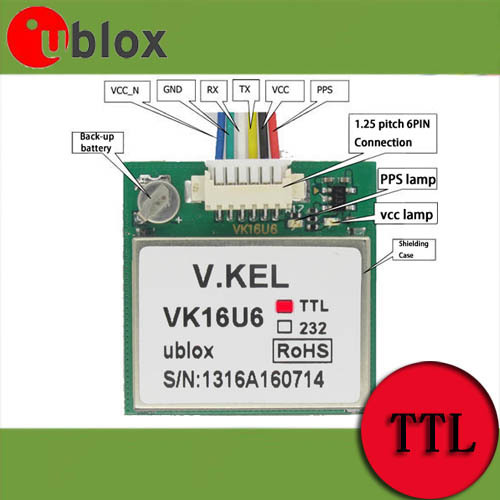
Основное, что можно делать с этим приемником — читать данные по протоколу NMEA с TX пина. Уровни — 5V,скорость — 9600 бод. Для подключения к Arduino используем программный UART на пинах 2 и 3. Для чтения данных используем библиотеку TinyGPS.
Отправка данных на сервер (GSM/GPRS shield)
Подключаемся к Arduino к контактам 7 и 8.
Для получения страницы по определенному URL нужно послать следующие команды:
AT+SAPBR=1,1 //Открыть несущую (Carrier)
AT+SAPBR=3,1,"CONTYPE","GPRS" //тип подключения - GPRS
AT+SAPBR=3,1,"APN","internet.beeline.ru" //APN, для Билайна - internet
AT+HTTPINIT //Инициализировать HTTP
AT+HTTPPARA="CID",1 //Carrier ID для использования.
AT+HTTPPARA="URL","http:/????????.ru/gps_tracker/gps_tracker1.php?id_avto=?N&lat=XXXXXlon=YYYYY" //Собственно URL, после sprintf с координатами
AT+HTTPACTION=0 //Запросить данные методом GET
AT+HTTPREAD //дождаться ответа
AT+HTTPTERM //остановить HTTP
Предусмотрим еще один момент - при написании серверной части и web-интерфейса предусмотрим получение и вывод результатов для нескольких модулей (id_avto=N), поставим переключатель на 3 позиции, что позволит получать информацию от 8 транспортных средств.
Вид GPS-трекера в сборе. + добавлена батарея LiPo для перестановки, например на велосипед

Написание скетча на Arduino
Чтобы не отправлять данные во время стоянки транспортного средства, отправлять будем данные, только если GPS дынные будут изменяться на значение, указанное в константе MINCANGE.
Интервал отправки данных - константа INTERVALSEND мсек. Наличие двух активных программных последовательных портов приводит к ошибкам получения/отправки данных, поэтому приходится переключать состояние программных последовательных портов для работы с каждым шилдом.
GPRS.end();gpsSerial.begin(9600);
В процедуре setup() - выбор номера модуля для отправки данных на сервер (id_avto=) - считывается их трехпереключателей
Сам скетч
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
|
#define INTERVALSEND 30000#define MINCHANGE 100#include "SoftwareSerial.h"SoftwareSerial GPRS(7, 8);int onModulePin= 9;char aux_str[150];char aux;char data[512];int data_size;uint8_t answer=0;#include "TinyGPS.h"TinyGPS gps;//Tx, Rx SoftwareSerial gpsSerial(2, 3);long lat, lon;long endlatsend=0; long endlonsend;unsigned long time1,date1;unsigned long age;bool newdata = false;unsigned long millis1=0;unsigned long millissend=0;unsigned long millisdata=0;char apn[]="internet.beeline.ru";char url[150];int id_avto=1;void setup() { GPRS.begin(19200); // the GPRS baud rate Serial.begin(9600); // the Serial port of Arduino baud rate. //gpsSerial.begin(9600); Serial.println("Starting..."); pinMode(onModulePin,OUTPUT); pinMode(12,OUTPUT); digitalWrite(12,LOW); power_on(); delay(3000); //sendATcommand("AT", "OK", 2000); //delay(3000); // sets APN , user name and password sendATcommand("AT+SAPBR=3,1,\"CONTYPE\",\"GPRS\"", "OK", 2000); snprintf(aux_str, sizeof(aux_str), "AT+SAPBR=3,1,\"APN\",\"%s\"", apn); sendATcommand(aux_str, "OK", 2000); while (sendATcommand("AT+SAPBR=1,1", "OK", 2000) == 0) { delay(2000); } delay(1000); }void loop() { digitalWrite(12,HIGH); GPRS.end();gpsSerial.begin(9600); while (millis() - millis1 < 2000) { if (readgps()) newdata = true; } if (newdata) { gps.get_position(&lat, &lon, &age); millisdata=millis(); Serial.print("lat=");Serial.print(lat); Serial.print(" lon=");Serial.print(lon); gps.get_datetime(&date1, &time1, &age); Serial.print(" date=");Serial.print(date1); Serial.print(" time=");Serial.println(time1); newdata=false; } //if(millis()-millissend>INTERVALSEND && millis()-millisdata<INTERVALSEND //&& abs(lat-endlatsend)>MINCHANGE && abs(lon-endlonsend)>MINCHANGE) if(millis()-millissend>INTERVALSEND && millis()-millisdata<INTERVALSEND && abs(lat-endlatsend)>MINCHANGE && abs(lon-endlonsend)>MINCHANGE ) { GPRS.begin(19200);gpsSerial.end(); // Initializes HTTP service answer = sendATcommand("AT+HTTPINIT", "OK", 10000); if (answer == 1) { // Sets CID parameter answer = sendATcommand("AT+HTTPPARA=\"CID\",1", "OK", 5000); if (answer == 1) {// Sets url endlatsend=lat;endlonsend=lon; String surl1=set_url_avto()+"&lat="+String(lat)+"&lon="+String(lon); surl1+="&date="+String(date1)+"&time="+String(time1); surl1.toCharArray(url,surl1.length()+1); snprintf(aux_str, sizeof(aux_str), "AT+HTTPPARA=\"URL\",\"%s\"", url); answer = sendATcommand(aux_str, "OK", 5000); if (answer == 1) {// Starts GET action answer = sendATcommand("AT+HTTPACTION=0", "+HTTPACTION:0,200", 10000); if (answer == 1) { sprintf(aux_str, "AT+HTTPREAD"); sendATcommand(aux_str, "OK", 5000); } else { Serial.println("Error getting the url"); } } else { Serial.println("Error setting the url"); } } else { Serial.println("Error setting the CID"); } } else { Serial.println("Error initializating"); } sendATcommand("AT+HTTPTERM", "OK", 5000); millissend=millis(); } else Serial.println("data not change!!!"); millis1=millis(); GPRS.begin(19200);gpsSerial.end(); }// отправка AT-командint8_t sendATcommand(char* ATcommand, char* expected_answer, unsigned int timeout) { uint8_t x=0, answer=0; char response[150]; unsigned long previous; memset(response, '\0', 150); // Initialize the string delay(100); while( GPRS.available() > 0) GPRS.read(); // Clean the input buffer GPRS.println(ATcommand); // Send the AT command x = 0; previous = millis(); // this loop waits for the answer do{ if(GPRS.available() != 0) { // if there are data in the UART input buffer, reads it and checks for the asnwer response[x] = GPRS.read(); //Serial.print(response[x]); x++; // check if the desired answer is in the response of the module if (strstr(response, expected_answer) != NULL) { answer = 1; } } } // Waits for the asnwer with time out while((answer == 0) && ((millis() - previous) < timeout)); Serial.println(response); return answer; }// программное включение питанияvoid power_on() { uint8_t answer=0; //answer = sendATcommand("AT+CPOWD=1", "OK", 2000); pinMode(onModulePin,OUTPUT); // checks if the module is started digitalWrite(onModulePin,LOW); delay(1000); digitalWrite(onModulePin,HIGH); delay(2000); digitalWrite(onModulePin,LOW); delay(3000); answer = sendATcommand("AT", "OK", 2000); if (answer == 0) { digitalWrite(onModulePin,LOW); delay(1000); digitalWrite(onModulePin,HIGH); delay(2000); digitalWrite(onModulePin,LOW); delay(3000); Serial.println("POWER!!!!"); // power on pulse digitalWrite(onModulePin,HIGH); delay(3000); digitalWrite(onModulePin,LOW); // waits for an answer from the module while(answer == 0) { // Send AT every two seconds and wait for the answer answer = sendATcommand("AT", "OK", 2000); } } }// проверка наличия данных gpsbool readgps() { while (gpsSerial.available()) { int b = gpsSerial.read(); //в TinyGPS есть баг, когда не обрабатываются данные с \r и \n if('\r' != b) { if (gps.encode(b)) return true; } } return false; } String set_url_avto() { String surl1; if(digitalRead(14)==1) id_avto=id_avto+1; if(digitalRead(15)==1) id_avto=id_avto+2; if(digitalRead(16)==1) id_avto=id_avto+4; surl1=surl+String(id_avto); Serial.print("surl1=");Serial.println(surl1); id_avto=0; return surl1; } |
Отправка данных на сервер - обработчик скрипт gps_tracer1.php. Скрипт обрабатывает GET-данные и записывает их в базу данных.
Содержимое скрипта
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
<?php require_once("mybaza.php"); $id_avto=$_GET[id_avto]; $lat=$_GET[lat]/100000; $lon=$_GET[lon]/100000; $data=date('Y-m-d H:i:s'); $query1="INSERT into gps_tracker SET id_avto=".$id_avto.",lat=".$lat.",lon=".$lon.", data='".$data."' "; if(!mysql_query($query1)) echo "error=".$query1; else echo "OK";?> |
WEB-интерфейс
Web-интерфейс -отображение на Яндекс.Картах текущего (последнего переданного) положения либо маршрута за выбранный период.
Текущее положение - метка , на балуне время для данной метки.
При построении маршрута по меткам строится полигон, на балуне для каждой метки отображается время. Для быстрого построения страницы предусмотрена константа максимального количества меток, следующие метки подгружаются кнопками > и <.
Интерфейс написан с использованием технологии ajax (,библиотека xajax). В прикрепленном архиве файлы сайта и дамп БД.



Прикрепленные файлы:
- http_cxemnet_05.zip (3 Кб)
- www.zip (140 Кб)






